


















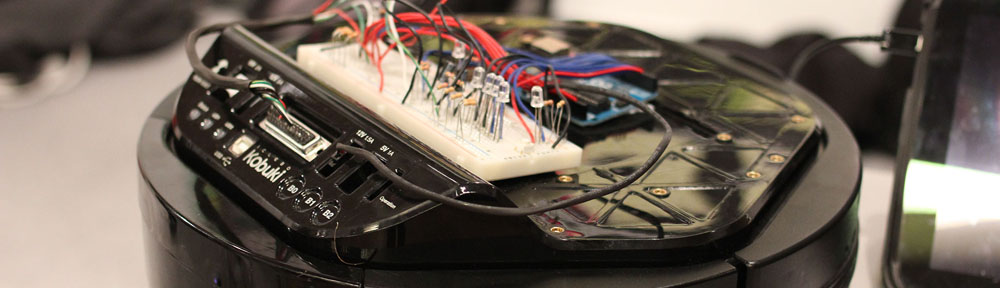

Corobot robots used in the COMRADE system.
An IEEE Robotics & Automation Society – Special Interest Group on Humanitarian Technology (RAS-SIGHT) was approved by the IEEE Humanitarian Ad Hoc Committee (HAHC) in September 2012. RAS is the first IEEE Society to have a SIGHT! The mission of RAS-SIGHT is the application of robotics and automation technologies for promoting humanitarian causes around the globe, and to leverage existing and emerging technologies for the benefit of humanity and towards increasing the quality of life in underserved, underdeveloped areas in collaboration with existing global communities and organizations. The Humanitarian Robotics and Automation Technology Challenge (HRATC), as the name implies, is intended to showcase the use of applied robotics and automation technology to solve problems for humanitarian causes. HRATC at ICRA’13 is a demo event and will be transitioned into a robot challenge event from ICRA’14.
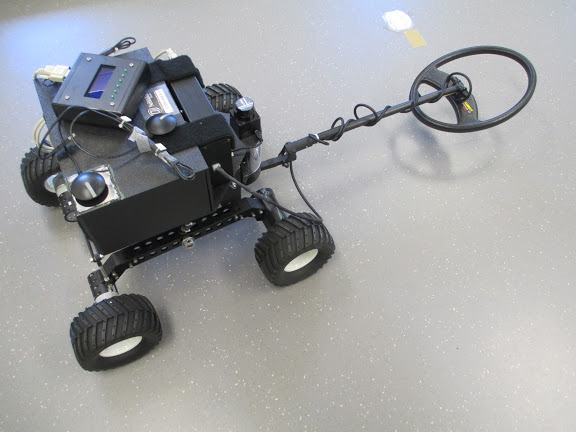
Explorer robot with metal detector.
At ICRA’13, we are demonstrating an autonomous, multi-robot system called COMRADE (COoperative Multi-Robot Automated DEtection) system that can aid in humanitarian demining efforts. Humanitarian demining is crucial to ensure the safety and security of humans in post-conflict regions. Unfortunately, current humanitarian demining efforts lag significantly behind the rate of landmine-related accidents in post-conflict regions due to various economic and technological challenges. COMRADES provides a possible solution to alleviate some of these issues by developing relatively low-cost, easy-to-deploy robotic technology, using off-the-shelf robots and sensors, to detect and locate landmine-like objects with high accuracy. The major technological components in the COMRADE system include multi-robot terrain exploration and coverage algorithms, multi-robot task allocation and task-sharing algorithms, multi-robot information fusion algorithms and an active user interface that enables a human user to dynamically monitor the robots’ locations, status, battery life, etc., and, selectively control the deployment of the robots to high-interest regions.
Our HRATC demonstration uses two four-wheeled skid-steer robots called Corobots for a simulated landmine detection scenario. Landmine-like objects are simulated with red-colored markers that are placed arbitrarily on the floor of the environment. Each Corobot robot is equipped with IR proximity sensors, WiFi-based wireless communication, a color Web camera and an IR-based indoor localization system that gives the position and orientation of the robot within its environment. Robots are deployed remotely by the human user from the control station. Each robot searches autonomously for potential ‘landmines’ (red floor markers) using its on-board camera. On detecting a ‘landmine’, a robot sends the landmine’s location to all other robots within its communication range and to the control station. Other robots receiving the location of the potential landmine then head towards the reported location of the landmine to locate and confirm it on their sensors (camera). The location of the landmine is also displayed on the user interface. The user interface gets updated dynamically as more landmines are detected by the robots within the environment.
The COMRADES project is being performed at the CMANTIC Lab (http://cmantic.unomaha.edu), Computer Science Department at the University of Nebraska, Omaha and is currently supported by the US Department of Defense, Office of Naval Research.
More information is available from
http://cmantic.unomaha.edu/projects/comrades/index.htm
Participation is welcome to those applying robotic and automation technologies for humanitarian causes.
If you are interested in participating in RAS-SIGHT activities and in HRATC’14, please contact Raj Madhavan, Chair, RAS-SIGHT at raj.madhavan@ieee.org.